FilipINO è un robot nato per pulire il pavimento di casa in modo semplice, rapido ed economico.
Questo piccolo robot è composto da:
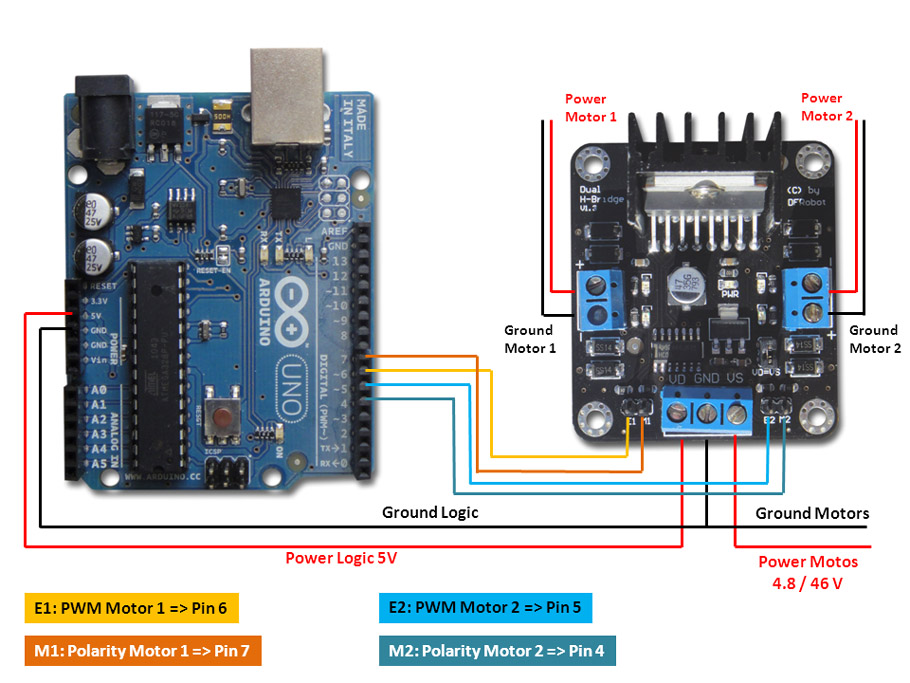
– Un driver per motori L298N che ci permette di controllare ben 2 motori.
– 3 sensori ad ultrasuoni HC-SR04 per misurare le distanze di DESTRA/AVANTI/SINISTRA.
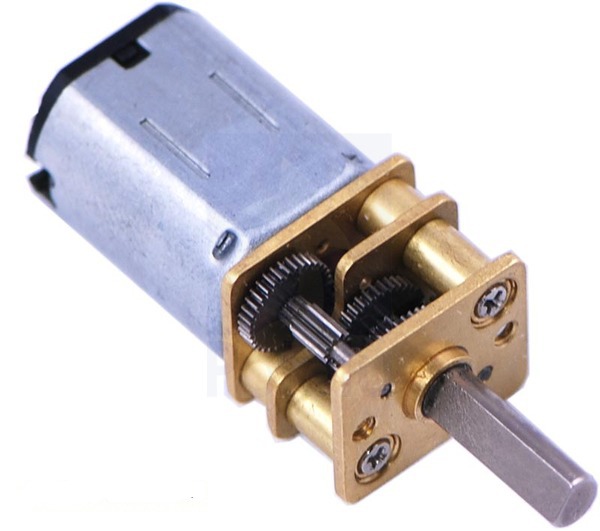
– 2 Pololu motor da 6V con rapporto 30:1.
Ecco come vanno fatti i collegamenti(nel programma i pin potrebbero essere diversi in tal caso cambiateli con un click 😉 ),per gli ultrasuoni dovete ovviamente usare 6 pin 2 per ogni ultrasuono.
La logica con cui opera filipINO è molto semplice, perchè non fa altro che analizzare le 3 distanze misurate dagli ultrasuoni, decidendo dopo delle comparazioni, di andare nella direzione dove ha più spazio.
Scarica il programma cliccando sulla nuvola
Alcuni componenti che potrebbero servirvi direttamente da Amazon.
“IPHONE ZERO è il primo modello di iPhone, che Steve Jobs realizzò a 8 anni, nel garage di casa, collegando due lattine di coca-cola con un filo della biancheria e gridando “pronto!” in una delle due lattine mentre sua madre era in ascolto all’altra lattina.Ognuno può realizzarlo con le sue mani, a costo quasi nullo, personalizzando il regalo con una spiritosa cover di carta di giornale.”
ArduFonino è un cellulare opensource creato con arduino, capace di effettuare e ricevere chiamate e di inviare e ricevere messaggi, inoltre con la realizzazione di questo progetto ho voluto gettare le basi per la costruzione di un sistema telefonico elementare. L’idea mi è venuta per semplice curiosità, perché volevo fare qualcosa che nessuno avesse mai fatto, dimostrando a tutti che volere è potere.
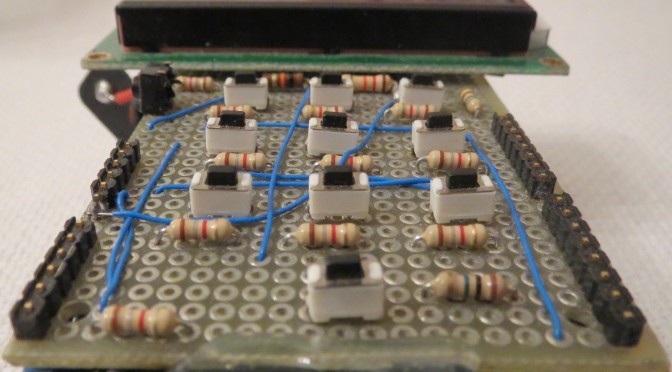
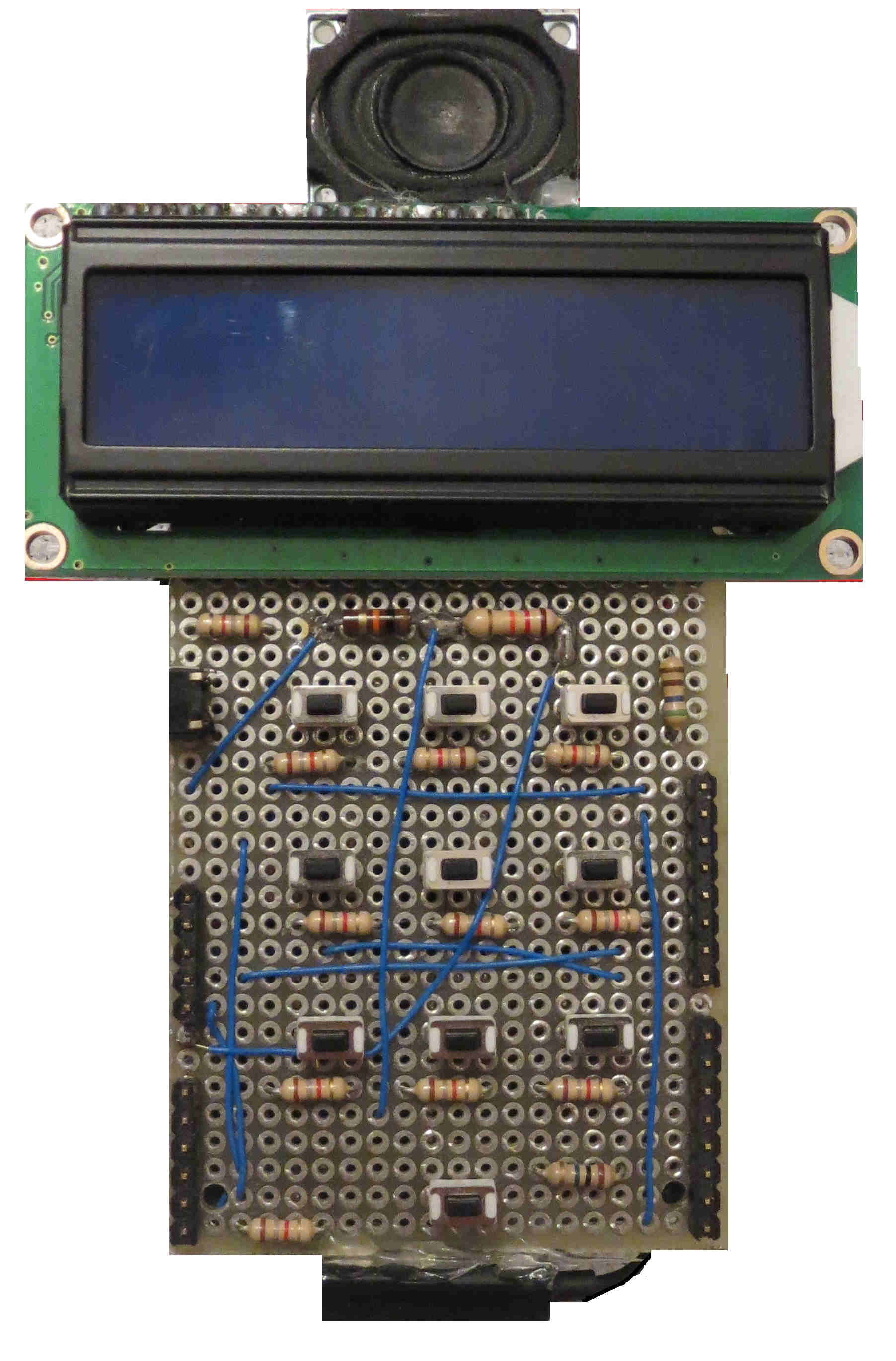
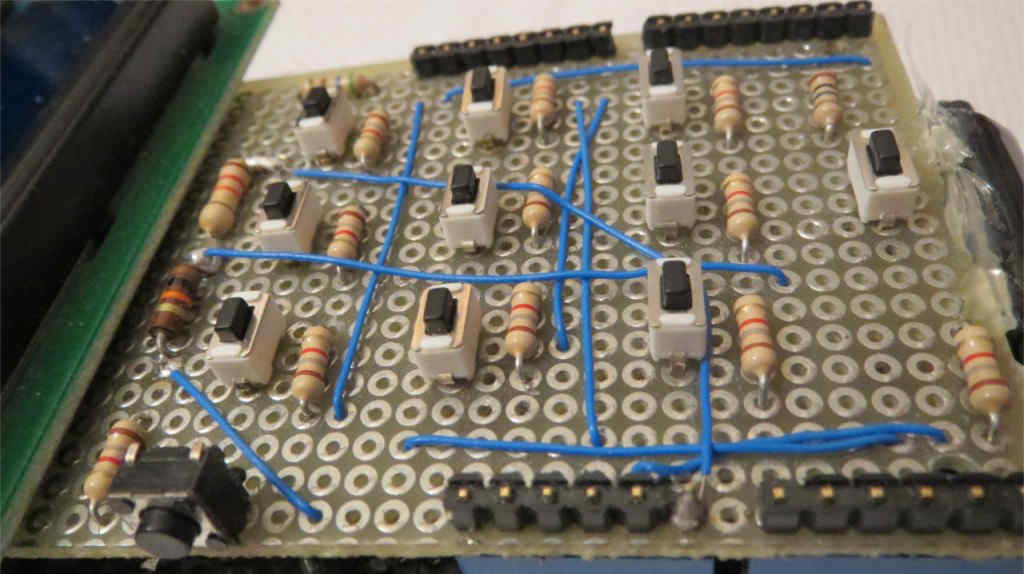
-Shield di interfacciamento, è la parte con la quale controlliamo il telefono, è costituita da una tastiera di 11 pulsanti, da un display LCDretroilluminato, da un microfono, da un altoparlante, da un trimmer e da 13 resistenze. La disposizione dei componenti è quasi uguale a quella dei vecchi cellulari con tastiera, per via della sua enorme comodità, inoltre questa interfaccia può essere collegata sia ad un arduino UNO e ad un arduino MEGA.
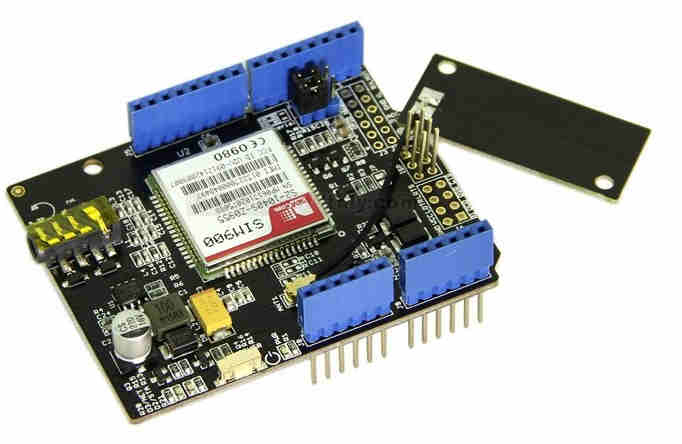
-Shield GSM, un circuito che ci permette appunto di ricevere ed inviare chiamate e messaggi, per pilotarlo utilizzeremo dei comandi AT che arduino invierà tramite una comunicazione seriale . Questa shield a integrata l’uscita e l’ingresso audio (tramite un connettore jack), l’antenna ed un modulino GSM.
Compra la tua prima Shield GSM
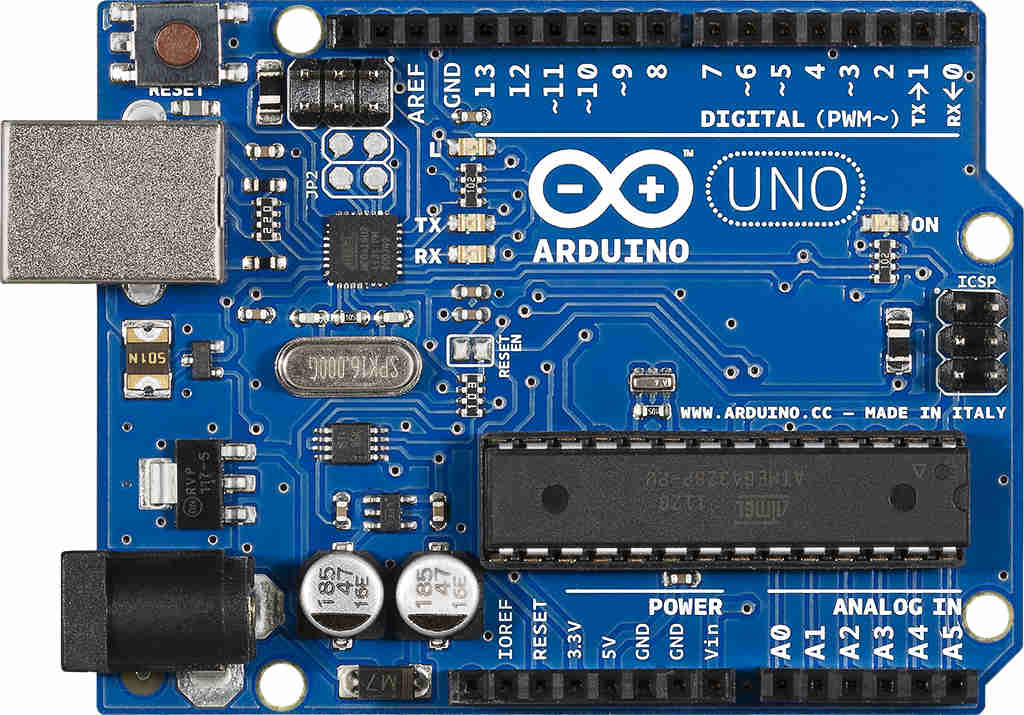
-Arduino UNO, un microcontrollore che funzina a 16 Mhz, con 13 pin digitali e 6 analogici è il componente più importante del progetto, perché permette, la realizzazione vera e propria del cellulare, dato che fa da tramite tra le due shield.
La tastiera in questo progetto è fondamentale, perché è l’unico modo per potersi interfacciare al dispositivo(l’alternativa è usare il Serial Monitor).
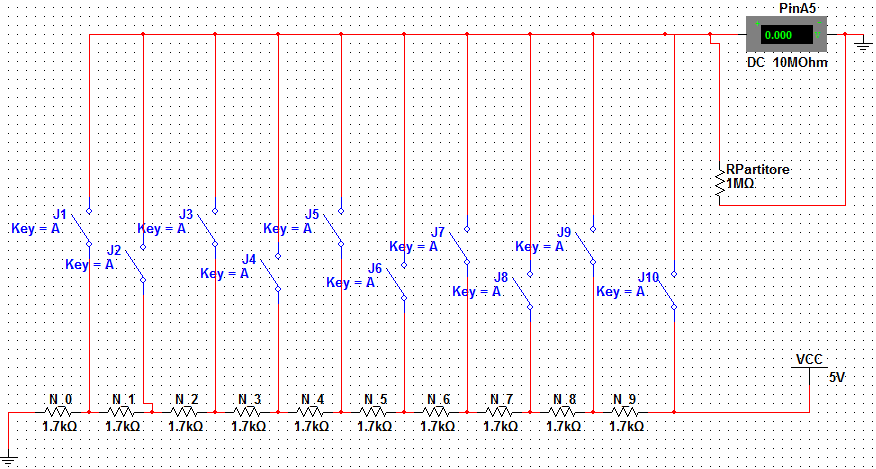
L’immagine la schematizzazione circuitale della tastiera, che ci permette di leggere, con un solo pin analogico, ben 10 pulsanti. La logica di funzionamento consiste nell’ assegnare ad ogni resistenza (N) il valore di caduta di tensione pari a 0,5V e quando un pulsante viene premuto chiude il contatto, restituendo al pin A5 una tensione pari al numero di resistenze nel ramo per 0,5. La resistenza per fare la partizione è molto grande perché così non avremo grandi perdite.
Ipotizziamo che venga chiuso il contatto J3, la tensione ai capi di A5 sarà uguale a:
Dato che in tutte le resistenza N abbiamo la stessa caduta di tensione ci basterà fare:
Una volta realizzato il circuito passiamo alla scrittura del programma, che inizia con un ciclo do, nel quale leggiamo ogni 10 mS il pin A5 e per uscirne basterà premere: o un tasto della tastiera, o il tasto di chiamata.
Successivamente quando usciremo dal ciclo il valore analogico del pulsante premuto sarà convertito nel valore effettivo del tasto, tramite una proporzione (map) ed infine, la funzione ci restituirà questo risultato.
Il problema dell’antirimbalzo è stato risolto non via hardware, ma via software mettendo un ritardo all’interno della funzione. La resistenza Rp non influisce sul corretto funzionamento della tastiera ( è stata utilizzata per effettuare delle prove in passato).
Questa funzione ci permette di scrivere, tramite la tastiera il numero che vorremo chiamare. All’inizio troviamo delle variabili che verranno incrementate ogni volta che digiteremo qualcosa, facendo scorrere verso destra il numero successivo. Dopo troveremo un if che, se vero, azzererà tutte le variabili, sennò svolgerà questi due calcoli:
Il sensore HC-SR04 è un sensore ad ultrasuoni molto facile da interfacciare ad arduino composto da 4 pin:
– VCC deve essere 5V
– GND
– TRIGGER pin per attivare e disattivare il trigger
– ECHO il pin che ci restituisce il valore della lettura
Per poter acquisire dei dati da questo sensore dovremo solamente mettere a livello logico 1 e poi dopo un ritardo a livello logico 0 il pin di TRIGGER, successivamente leggeremo tramite l’echo il tempo che ha impiegato l’ultrasuono a ritornare.
Infine ci basterà calcolare tramite una semplice formula la distanza tra sensore ed ostacolo.
Troverete tutte le informazioni all’interno del file ZIP
In questa pagina vi spiegherò come interfacciare un arduino qualsiasi ad un touch screen RESISTIVO. ci serviranno:
– Un arduino
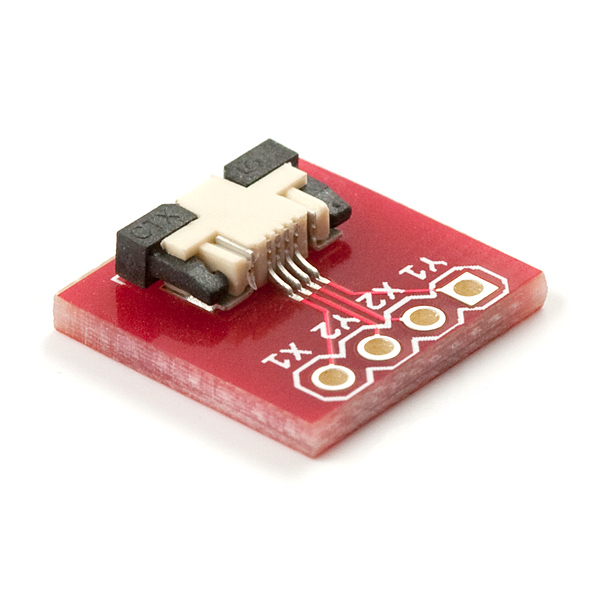
– Un connettorino per il touch screen
– Un touchscreen
L’adattatore di colore rosso ci servirà a collegare i pin del touch con quelli di arduino. La logica di funzionamento del touch è molto semplice, esso può essere rappresentato come un insieme di 2 potenziometri.
Quando eserciterete una pressione sul touch esso farà variare i valori di questi due componenti,
e per sapere con precisione il punto in cui verrà applicata questa forza ci basterà sapere il valore di X ed Y.
Una volta fatto ciò intersecheremo questi due risultati che ci forniranno il punto di contatto.
Collegamenti:
arduino pin A0 (14) collegato ad Y1
arduino pin A1 (15) collegato ad X2
arduino pin A2 (16) collegato ad Y2
arduino pin A3 (17) collegato ad X1
Nel programma i valori di X ed Y saranno in millimetri